






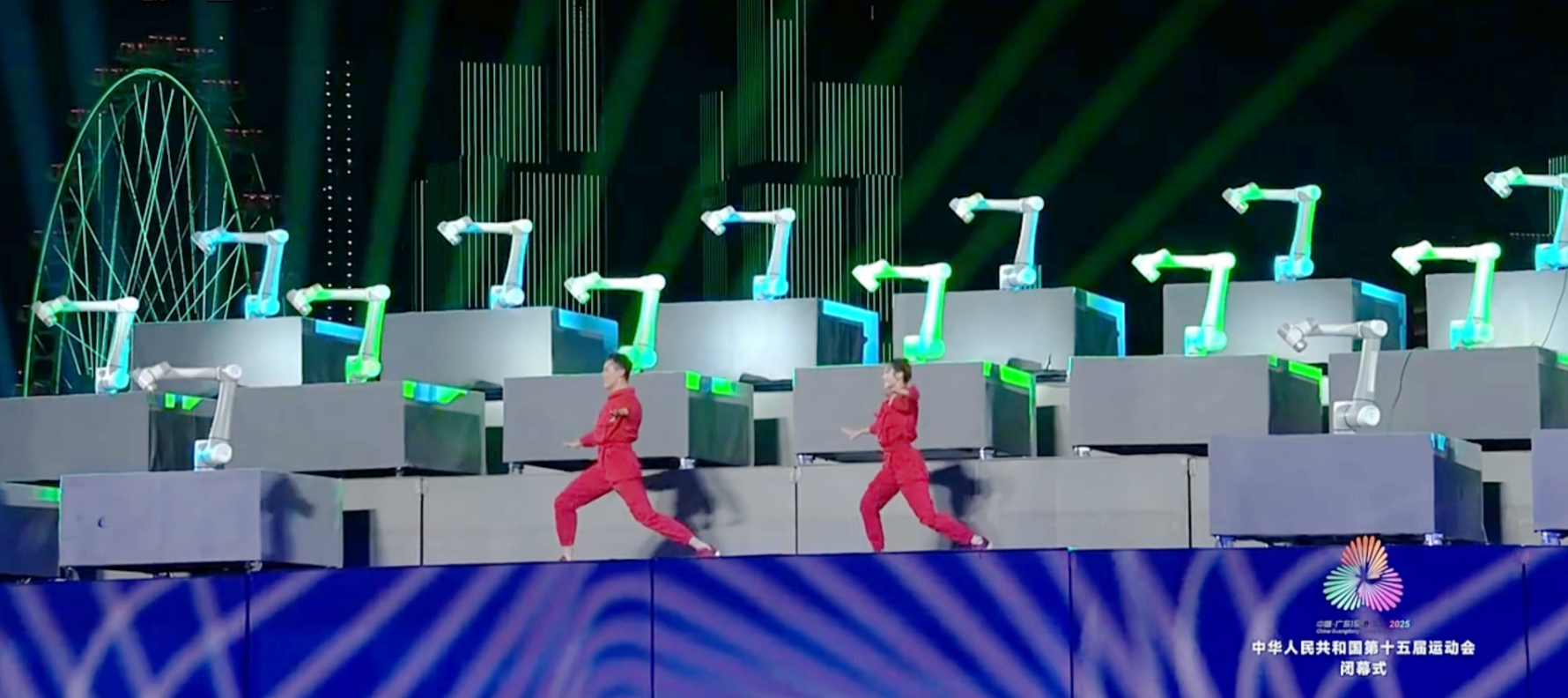
2025年11月21日,第十五屆全國運動會在深圳歡樂劇場舉行閉幕式。在海上搭建的舞台上,30台高精度智能機器人與中國東方演藝集團首席舞者協同起舞,實現人機共演,開創國內舞台表演先河。
視頻:越疆人形機器人Atom在十五屆全運會閉幕式上表演
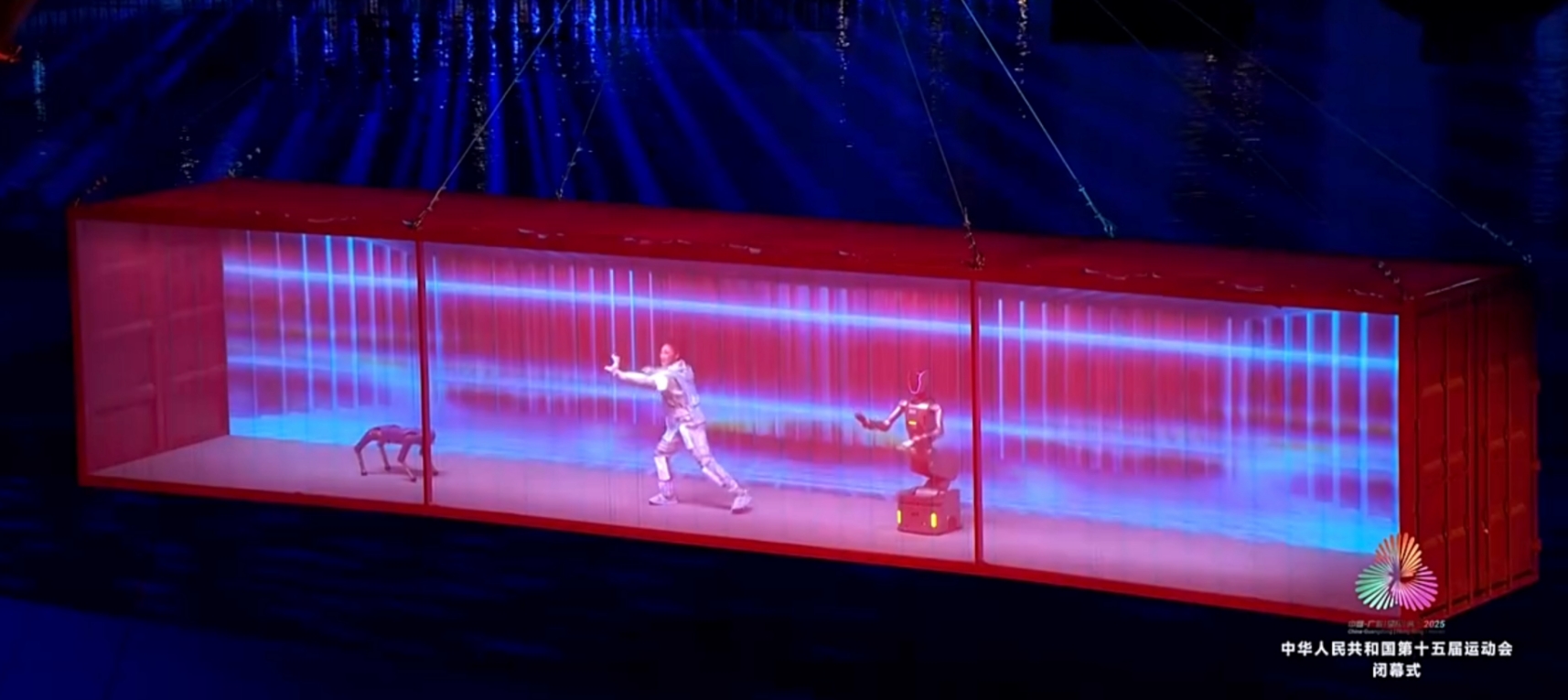
人形機器人越疆Atom與08年奧運飛天舞者殷碩在懸空集裝箱中完成自主舞動,精準配合。這場全球首次「海上+高空」雙場景機器人集群表演,不僅驚艷四座,更展現了中國機器人技術的頂尖水平。
本次表演中,機器人面臨排練頻繁拆裝、移位振動帶來的結構穩定與快速校準挑戰。30台設備在密集無線信號中還需保持高度同步,任何延遲都可能導致表演失序。
越疆通過整機結構強化與模塊化設計,實現機器人「即插即用」,在重複部署後自動恢復軌跡精度,即便在雨水、振動干擾下仍保持亞毫米級定位精度。
表演現場
核心部件經特殊防腐蝕、防潮處理,結構密封設計確保高濕鹽霧環境下穩定運行。全棧自研產線將30台機器人參數一致性控制在極窄範圍,為集群同步奠定硬件基礎。
軟件層面,依託EtherCAT總線技術與自研高扭矩電機、雙編碼器系統,構建「指令-通信-執行-結構」全鏈路同步,實現「30台機器人毫秒級同步,高性能高可靠」,從容應對極端動態穩定性、高抗干擾能力的嚴苛挑戰。
高空集裝箱中,機器人面臨三大挑戰:隨風晃動的動態平衡、與舞者近距離互動的安全容錯、複雜舞姿的精準執行。
越疆構建了以「具身智能」為核心的技術體系。人形機器人Atom搭載自研「腦-眼-手」協同系統,端側AI芯片提供1500TOPS算力,視覺+靈巧手實現伺服級抖動抑制與200Hz高頻控制,可在0.2秒內響應舞者即興動作,展現出「人形機器人自主穩定運行」所依賴的高動態平衡和極速精準響應能力。
機器狗RoverX1通過動態平衡算法適應晃動,與Atom形成「高空-地面」協同。多傳感器融合感知實時捕捉環境與舞者變化,全程實現零意外。
越疆通過「極端環境防護」「全鏈路協同」與「具身智能決策」三大技術整合,形成覆蓋「靜態穩定-動態適配-人機協同」的完整體系。表演將「工業級可靠性」轉化為藝術呈現,打破機器人作為「冰冷工具」的刻板印象,推動其在文化娛樂、商業服務等場景的社會認知。
表演現場
同時,高空與海上場景驗證的高防護、抗干擾、自主決策等技術,可直接遷移至港口物流、海洋工程、應急救援等行業,解決戶外機器人「易損壞、精度低」的痛點。
越疆全棧自研架構支撐了多產品、多場景的協同創新,展現出中國機器人從工業場景走向極端應用與藝術共創的綜合能力。
當最後一個音符落下,機器人與舞者共同定格,掌聲響起。正如越疆CEO劉培超所言:「機器人不會只待在工廠里,它們將走向更多場景,創造更廣泛的社會價值。這場表演,只是一個開始。」(記者 黃鳳鳴)





電話:(香港)852-2564 0768
(深圳)86-755-83518792 83518734 83518291
地址:香港九龍觀塘道332號香港商報大廈









